Standard/Planning Search Problems
Standard search problems
- Solution to a standard search problem: a plan
- Use a search algorithm to find the plan and solve the search problem
- Search algorithms are performed on the search tree (of the problem) to find the solution to the search problem
- All search algorithms follow the same algorithm, but just use a different data structures for the fringe
Types of standard searches
➤ UNINFORMED SEARCH
uninformed search - a search that does not know information about the goal's location
Types of uninformed searches
- Depth first search (DFS) - a search strategy that expands the deepest node first
- Implementation: uses a last-in-first-out (LIFO) stack as the fringe
- Time complexity: $O(b^m)$, for a finite tree where $m$ is the maximum depth and $b$ is the branching factor
- Space complexity: $O(bm)$
- DFS expands only the nodes on a single path from the deepest level to the root
- Breadth first search (BFS) - a search strategy in which the root is expanded
- Implementation: uses a first-in-first-out (FIFO) queue as the fringe
- Time complexity: $O(b^s)$, where $s$ is the depth of the shallowest solution, and $b$ is the branching factor
- Space complexity: $O(b^2)$
- At worst case, BFS's fringe contains all the nodes in the level corresponding to the shallowest solution, which is located at depth s of the search tree
- Uniform cost search (UCS) - a search strategy that expands the cheapest node first
- BFS vs. UCS
- While BFS is guided by length of path via the number of edges of the search tree, UCS is guided by cost
- BFS finds the shortest path while UCS finds the lowest-cost path
- Implementation: uses a priority queue, with the priority value being the cumulative (backward) cost, as the fringe
- backward cost - the sum of the edge weights in the path from the root to the current node/state
- Whenever a node is chosen for expansion, a lowest-cost path to that node has been found
- Time complexity: $O(\frac{b^{C^*}}{\epsilon})$, where $C^*$ is the cost of the optimal solution (the destination cost), $\epsilon$ is the cost of every action, and $b$ is the branching factor
- Space complexity: $O(\frac{b^{C^*}}{\epsilon})$
➤ INFORMED SEARCH
informed search - a search that takes into account information about the goal node's location in the form of a heuristic function
Heuristic functions
- heuristic function, $h(n)$ - a function that estimates how close a state/node is to a goal node
- A heuristic value is a guess/prediction
- Each search problem has its own (customized) heuristic function for solving the particular problem
- More effective heuristics return values closet to the actual cost of reaching the goal (the best heuristic is one that returns the true cost (i.e. one that estimates perfectly))
- Good heuristics
- Good heuristics are needed to find the optimal path in an informed search
- admissible heuristic - a heuristic $h(n)$ in which $0 \leq h(n) \leq h^*(n)$, $h^*(n)$ is the true cost to the nearest goal
- An admissible heuristic always underestimates the true cost of reaching the goal
- The maximum of 2 admissible heuristics is also admissible, and is in fact better than the two alone
- consistent heuristic - a heuristic $h(n)$ in which $h(n) \leq cost(n, n') + h(n')$, where $cost(n, n')$ is the cost of going from node $n$ to node $n'$ and $h(n')$ is the heuristic value of going from node $n'$ to the goal state (for all neighboring nodes, $n'$, of node $n$)
- Equivalently, $h(n) - h(n') \leq cost(n, n')$
- The difference in heuristic values must be $<=$ the actual cost of going from node $n$ to node $n'$
- A consistent heuristic is admissible, but an admissible heuristic may not be consistent
- The maximum of 2 consistent heuristics is also consistent
Types of informed searches
- Greedy search - a search algorithm that expands the node closest to the current node
- Implementation: uses a priority queue, with the priority value being the estimated forward cost
- forward cost (heuristic value) - an estimated cost of getting to the goal node
- Time and space complexities: Greedy search is unpredictable (its performance depends on different scenarios)
- A* search - a search algorithm that expands the node with the lowest total estimate, which is the sum of a node's backward and forward costs
- Implementation: uses a priority queue, with the priority value being the estimated total cost from the start to goal node
- total cost = cost(start node, current node) + estimate(current node, goal node)
- cost(start node, current node) is the cost of the path already traveled from the start to current node (backward cost)
- estimate(current node, goal node) is the estimate of the remaining cost to reach the goal node from the current node (forward cost)
- Time complexity: $O(b^m)$
- Space complexity: $O(b^m)$
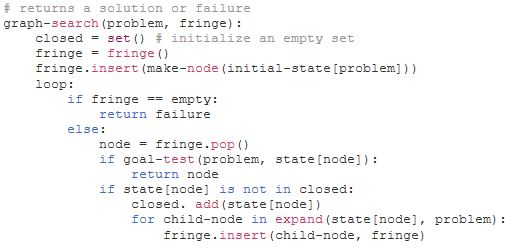
Graph search algorithm

Comments
Post a Comment